Ultrasonic C-scan automation for composite components, with robotics-based and high-speed ten-axis kinematic configurations.
Built for aerospace, automotive, wind energy and similar composite inspection programmes: complex curved-surface scans, C-scan imaging, automated path strategies, and multiple mechanical architectures to match throughput and footprint.

Overview
[01]
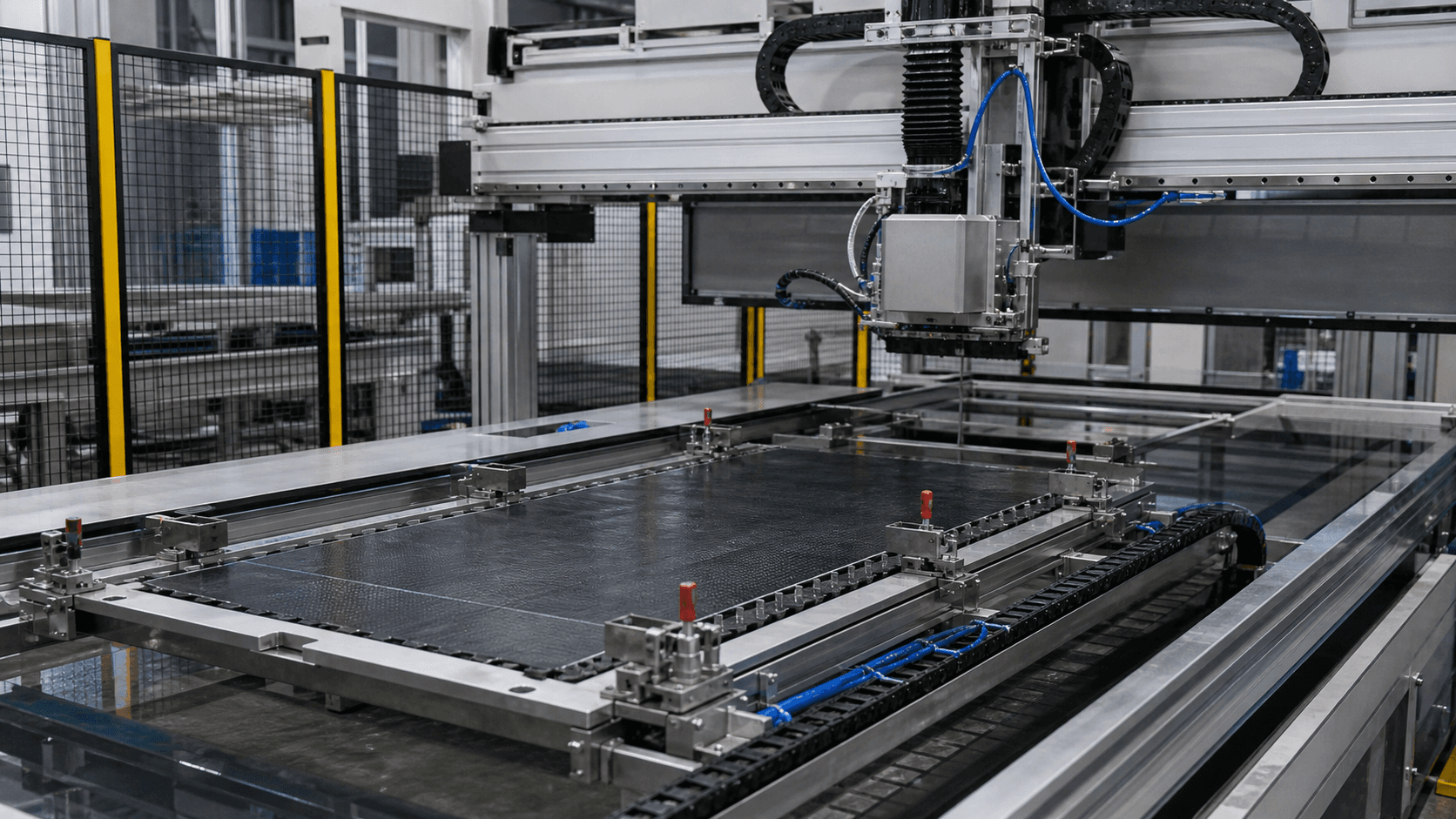
Automated ultrasonic inspection platform for composite parts
The platform performs automated ultrasonic C-scan inspections on composite parts of varied shape and constitution, emitting inspection imagery and searchable records aligned with each sweep recipe. Typical offerings split into robotics-based automatic ultrasonic C-scan systems and high-speed ten-axis C-scan lines—you pick from part geometry and programme intent.
It targets complex-shell components for automotive closures, aerospace structures, wind components, and other composite fabrication flows. Where outer envelopes are sculpted, duplicated scan patterns, automated path authoring, and 3-D path rehearsal improve fit-up before physical runs.
Mechanicals scale with geometry, takt, and aisle layout—single manipulator plus linear axis, tandem manipulators, tandem manipulators on tracks, or a ten-axis kinematic envelope for throughput-focused batch sweeps.
Where it fits
[02]
Composite component inspection scenarios across industries
Targets laminates, sandwich cores, and free-form composites where recipe-driven coverage and repeatable imagery matter.
- Aerospace
- Automotive manufacturing
- Automotive components
- Wind turbines
- Composite fabrication
- Structural inspection
Good fits cover carbon/glass laminates, honeycomb assemblies, and high-curvature composite assemblies where full envelopes and reproducible scans are prerequisites.
Core value
01
Purpose-built for sculpted composite blanks—skins, oddly shaped laminates, and large-area panels that must stay enclosed by the scan lattice.
02
Generates traversal paths programmatically with optional 3-D rehearsal before parts enter the guarded volume—speeding recipe sign-off.
03
Water-jet coupling, pulse-echo, and through-transmission configurations cover diverse laminate stacks and bond-line risks.
04
Select manipulators alone, tandem arms, carriage extensions, or a ten-axis high-speed kinematic backbone when envelopes or cycle time demand more freedom.
System capabilities centred on composite inspection
Auto C-scan
Automated ultrasonic C-scan
Programmed ultrasonic passes build C-scan dossiers tailored to defect screening and stakeholder review workflows.
System types
Choose a mechanical strategy for the workload
01 / 03
Leverages articulated manipulators to execute ultrasonic traversals on sculpted skins and odd envelopes; C-scan products pair with duplication-style sweeps.
02 / 03
When reach or span dominates, augment with longitudinal tracks—solo arm plus sled, mirrored arms, or tandem arms mounted on sleds widen coverage envelopes.
03 / 03
For aggressive takt, the coordinated ten-axis kinematic frame supports pulse-echo and through-transmission with published full-coverage fidelity plus archival/reporting tooling.
Final architecture merges outer mould lines, ply stack sensitivity, contractual acceptance, line balance, and equipment adjacency—coordinate these early with engineering.
Representative configurations
Models & specs
The portfolio spans robotics-class and ten-axis kinematic frames; below summarizes representative datasheet rows from the workbook pair used on composite programmes.
| Parameter | SUT-310FC | SUT-310FC-10 |
|---|---|---|
| Robot | Single / dual robot | — |
| Coupling | Water jet (squirter) | — |
| Mode | Pulse-echo + through-transmission | — |
| Feature | Auto path generation, 3-D simulation | — |
| Best for | Aerospace panels, wind blades | — |
| Axes | — | Ten-axis kinematics |
| Speed | — | Up to ~1000 mm/s |
| Coverage | — | 100 % sweep coverage class |
| Standard | — | HB5460-1990 |
| Data | — | 2000 archived datasets |
How it runs
Typical composite C-scan workflow
Step 01 / 05
Confirm part risk & recipe
Lock material constitution, sculpted envelope, ply stack sensitivities and contractual outputs so kinematics and UT modalities match the mandate.
Step 02 / 05
Develop scan trajectory
Import or reconstruct outer mould information, automate path authoring, rehearse traversal in simulation, freeze the guarded-volume programme.
Step 03 / 05
Execute automated sweep
Run robot or ten-axis kinematics along the authored route while acquisition streams C-scan tiles per recipe pacing.
Step 04 / 05
Indication imaging & adjudication
Reconstruct volumetric/stacked views to interrogate laminar anomalies, adhesion gaps, ply separations or disbond indications per method doctrine.
Step 05 / 05
Archive & publish results
Store structured rows (date stamps, specimen ids, gauges, indications, positional tags) plus export dossiers, KPI views, waveform replay artefacts and printable packets.
Tailoring latitude
[Custom]
Configuration depth for heterogeneous composite programmes
Programmes remix mechanics, ultrasonic personalities, databasing, and line-side choreography because sandwich cores, braided fabrics, patched repairs, and sculpted skins seldom share identical risk maps. Robotics, slideways, mirrored arms or ten-axis motion blocks align to those deltas while tooling and software stay modular.
- Tune manipulator or carriage footprints to sculpted envelopes
- Layer duplication sweeps wherever curvature dominates coverage gaps
- Extend reach with slideways when laminates dwarf single-arm envelopes
- Switch to ten-axis kinematics whenever line balance demands faster sweeps
- Select pulse-echo or through-transmission depending on attenuation stacks
- Blend C-scan campaigns with analogue pulse-echo spot checks where contracts allow
- Shape retention policies and dossier exporters to plant QA systems
- Coordinate guarding, conveyance, buffers, and ancillary stations with neighbouring processes
Frequently asked questions
Which workpieces does this system mainly address?
Carbon/glass laminates, honeycomb sandwich assemblies, and high-curvature composite fabrications dominate the backlog.
Is inspection limited to flat panels?
No. Robotics-class builds carry duplication-scan logic that tracks sculpted skins and odd envelopes without leaving dead zones.
Which ultrasonic modalities are advertised?
Pulse-echo and through-transmission are explicit; selectable hardware adds jet-coupled or pulse-echo speciality chains referenced in datasheet rows.
Does the software auto-author scan programmes?
Yes—complex geometries can ingest outer shell data or teach points so paths generate automatically plus optional 3-D rehearsal before commissioning.
Can data be retained and replayed?
The ten-axis class references two-thousand stored datasets with reporting dashboards, KPI summaries, waveform replay lanes and printable outputs.
What inputs accelerate quotations?
Share laminate constitution, sculpted envelope sketches, ply stack sensitivities, contractual acceptance wording, throughput targets, coupling preferences, aisle constraints, upstream/downstream material flow, plus any ancillary equipment touchpoints.
Ready to integrate?
Request a custom quote